

MCP2515 CAN MODULE
Share :
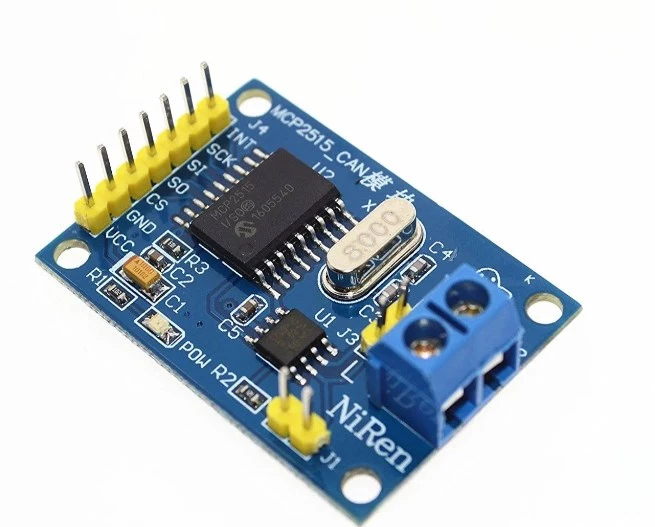
The MCP2515 CAN module is a standalone Controller Area Network (CAN) protocol controller, typically packaged with a TJA1050 (or similar) high-speed CAN transceiver on a small PCB. It is designed to provide a CAN bus interface to microcontrollers (MCUs) that do not have a native CAN module, utilizing the Serial Peripheral Interface (SPI) for communication.
Key Features and Specifications
Controller IC:Microchip MCP2515 (CAN Controller)
Transceiver IC:TJA1050 (High-Speed CAN Transceiver)
CAN Protocol: Fully implements CAN Specification 2.0B (supports standard 11-bit and extended 29-bit message IDs).
Maximum Bitrate: Up to 1 Mb/s (1 Megabit per second).
MCU Interface:SPI (up to 10 MHz) for command and data transfer.
Power Supply: Typically operates on a 5V DC supply.
Message Buffers:
Receive Buffers: Two, with prioritized message storage.
Transmit Buffers: Three, with prioritization and abort features.
Message Filtering: Features six acceptance filters and two acceptance masks to filter out unwanted messages, reducing the host MCU's overhead.
On-board Components: Often includes an 8MHz crystal oscillator for the MCP2515 and a 120Ω termination resistor (often selectable via a jumper or switch) for bus impedance matching.
Module Pinout (Common)
The module typically provides pins for power, SPI communication, an optional interrupt, and the CAN bus lines:
| Pin Name | Description | Connection to MCU (Example) |
| VCC | Power supply input, typically 5V. | 5V |
| GND | Ground reference. | GND |
| CS | Chip Select for SPI (Active Low). | Digital Pin (e.g., D10) |
| SO | SPI Data Out (Master Input Slave Output - MISO). | MISO Pin (e.g., D12) |
| SI | SPI Data In (Master Output Slave Input - MOSI). | MOSI Pin (e.g., D11) |
| SCK | SPI Clock. | SCK Pin (e.g., D13) |
| INT | Interrupt output pin (optional, signals new message or error). | Digital Interrupt Pin (e.g., D2) |
| CAN_H | CAN Bus High line. | CAN_H on other nodes |
| CAN_L | CAN Bus Low line. | CAN_L on other nodes |
Function and Application
The MCP2515 module acts as a protocol converter, simplifying CAN communication:
The host microcontroller (like an Arduino or STM32) sends and receives data and commands to the MCP2515 over the high-speed SPI interface.
The MCP2515 handles the complex CAN protocol tasks like message framing, error detection, arbitration, and bit timing.
The TJA1050 transceiver acts as the physical layer interface, converting the digital signals from the MCP2515 into the differential voltage signals required for the physical CAN bus lines (CAN_H and CAN_L).
This module is widely used in automotive diagnostics (OBD-II), industrial automation, robotics, and other embedded systems requiring reliable, multi-master communication over a robust bus.